Making Good Decisions given a Model of the World
Lecture 2 · Emma Brunskill · Stanford University · Winter 2019 · ·If there is any error, please raise an issue.
If there is any error, please raise an issue.
Recap:
\(S\) -> State Space; \(A\) -> Action Space
\(s'\) -> \(s_{t+1}\); \(s\) -> \(s_{t}\); and \(s \in S\)
Similarly, \(a'\) -> \(a_{t+1}\); \(a\) -> \(a_{t}\); and \(a \in A\).
Note that, action \(a\) is taken in current state \(s\)
Model: mathematical description of the dynamics and rewards of the agent’s including the transition probability \(P(s' \mid s, a)\) (Probability of getting into new state \(s'\) given, current state \(s\) and action taken at this state \(s\) is \(a\))
Policy: function \(\pi : S \rightarrow A\) => \(\pi\) maps states to actions
Value Function: \(V^{\pi}\) -> particular policy \(\pi\) gives cumulative sum of future discounted rewards obtained by the agent.
Markov Property: Future is independent of past, given present
Stochastic process satisfying Markov Property
Processes with these assumptions => Markov Chain
Such a transition matrix P is a Row Stochastic Matrix (means each element is non-negative (since all are probabilities \(\in [0, 1]\)) and sum of each row = 1)
tuple of (\(S, \textbf{P}, R, \gamma\))
Reward Function:
Maps states to rewards (real number) => \(R: S \rightarrow \mathbb{R}\)
Each transition \((s_i \rightarrow s_{i+1})\) is accompanied with a Reward \(r_i\)
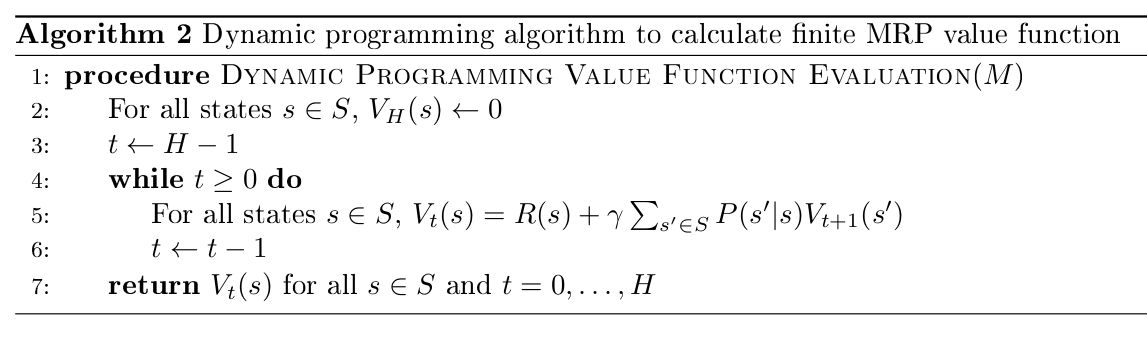
Horizon: No. of time steps in each episode (can be infinite, else called finite Markov reward process)
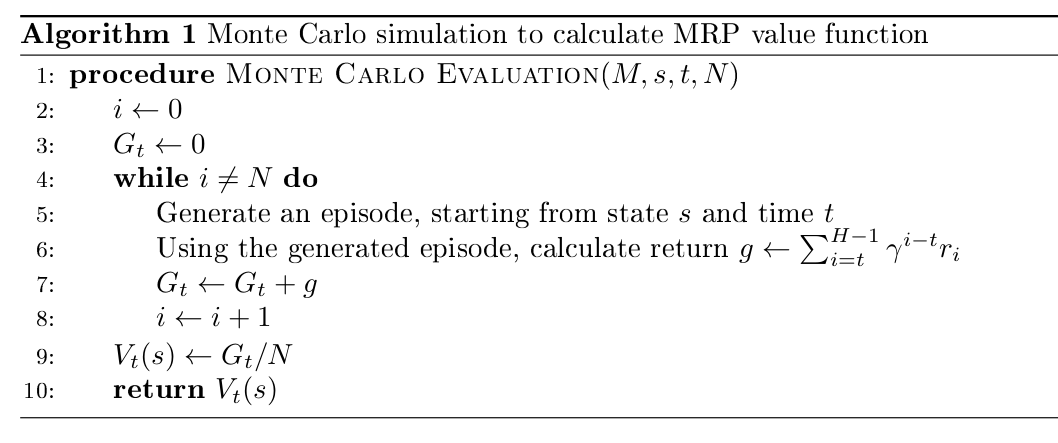
Return: Discounted sum of rewards from time t to horizon H
State Value Function: Expected return starting from state \(s\) at time \(t\)
Discount Factor (\(\gamma\)):
We tend to put more importance in immediate rewards over the rewards obtained at a later time. Hence \(\gamma \in [0, 1)\) is introduced.
If \(\gamma = 1\), and horizon \(H \rightarrow \infty \Rightarrow V(s) \rightarrow \infty\).
It is fairly accurate to have \(\gamma = 1\), if \(H\) is finite. But note that, \(\gamma = 1\) denotes, all the rewards are equivalent in spite of the fact you reach the final state or not (You may consider a case, when an agent jumps to and fro between two states, infinitely).
Geometric progression of \(\gamma\) is the most efficient and effective way, currently*.
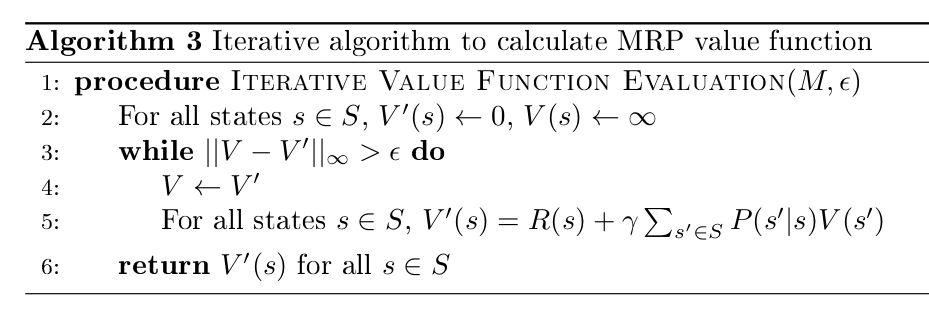
Works only infinite horizon Markov Reward Process with \(\gamma\) < 1.
Vectorized Notation:
Above equation can be rearranged to
tuple of (\(S, A, \textbf{P}, R, \gamma\))
Major difference from MRP, is the inclusion of Action space \(A\):
Now, the transition probability will be defined with the action \(P(s_i = s' \mid s_{i-1} = s, a_{i-1} = a)\)
Similarly, reward is defined as
MDP Policy: \(\pi (a \mid s) = P(a_t = a \mid s_t = s)\) can be deterministic or stochastic.
For generality: Consider it as conditional distribution.
MDP + \(\pi(a \mid s)\) = Markov Reward Process (Think about it, if can’t find answer, look the printed notes)
We know that, if there is a MDP \(M = (S, A, \textbf{P}, R, \gamma)\) and a (deterministic/stochastic) policy \(\pi (s|a)\), it can be considered equivalent to MRP \(M' = (S, \textbf{P}, R, \gamma)\).
=> The value function of the policy \(\pi\) evaluated on \(M\), denoted by \(V^\pi\), is actually same as value function evaluated on \(M'\). \(V^\pi\) lives in the finite dimensional Banach Space (\(\mathbb{R}^{\mid S \mid}\)).
Trivia: Banach Space \(\mathbb{R}^{\mid S \mid}\) is a complete vector space with norm \(\Vert .\Vert\). Normed Vector Space is basically a space where norm is defined (\(x\) -> \(\Vert x \Vert\)) or intuitively, the notion of “length” is captured.
Then, for an element \(U \in \mathbb{R}^{\mid S \mid}\), Bellman expectation backup operator is defined as
This equation is also termed as Bellman Expectation Equation.
Similarly, for an element \(U \in \mathbb{R}^{\mid S \mid}\), Bellman optimality backup operator is defined as
This equation is also termed as Bellman Optimality Equation.
The \(\max\) operation in Optimality Equation brings the non-linearity in \(U\), due to which, there is no closed form solution as in the case of Expectation Equation. Ref: StackExchange
There exists a unique optimal value function.
Taken from Stack Overflow
Policy iteration includes: policy evaluation + policy improvement, and the two are repeated iteratively until policy converges.
Value iteration includes: finding optimal value function + one policy extraction. There is no repeat of the two because once the value function is optimal, then the policy out of it should also be optimal (i.e. converged).
Finding optimal value function can also be seen as a combination of policy improvement (due to max) and truncated policy evaluation (the reassignment of \(V(s)\) after just one sweep of all states regardless of convergence).
The algorithms for policy evaluation and finding optimal value function are highly similar except for a max operation.
Similarly, the key step to policy improvement and policy extraction are identical except the former involves a stability check.